NOTE - You need firmware v0.0.124 or above for this add-on to function. Please use the app to check for updates available.
To connect your Gripper Arm add-ons to your Marty, you will need:
- Gripper Arm add-on
- A screwdriver
- A Marty
Attaching the Gripper Arm
Open the back of Marty's head, take off the top plate and open the face. This allows for easier access to the arms.
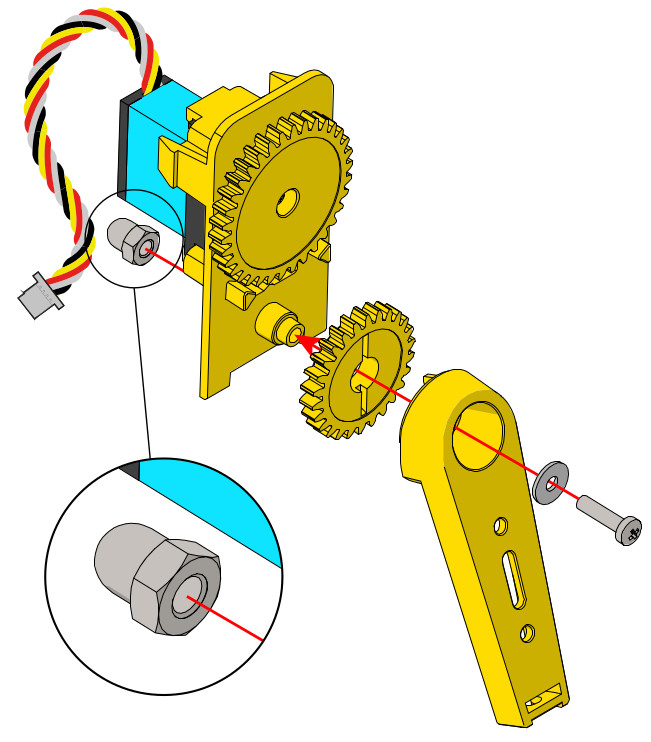
Remove the right arm from the head, by squeezing together the two clips inside the head at the top of the arm. Unscrew the current arm from the smaller gear (shown in the image below) and screw the gripper arm into the same place.

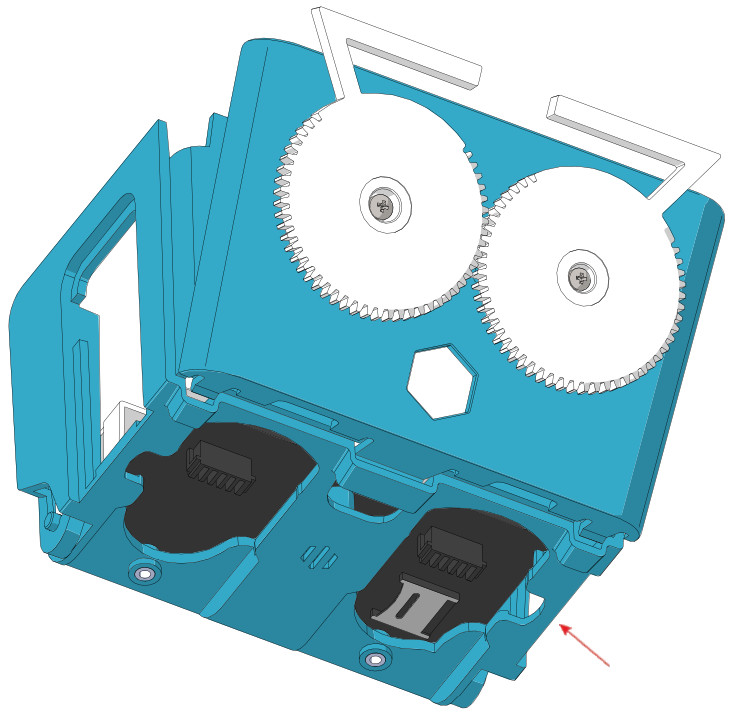
Make sure the right arm servo is still plugged into the correct port. Feed the new cable from the gripper arm servo through the hole underneath the head, next to the hip. (Highlighted by the red arrow in the photo below.)
Plug the gripper arm servo's cable into a spare I2C port, such as B3, found on the RIC board as seen in the image below.

Clip the Marty arm back into the body and clip the face plate back onto the head. Replace the top plate.
Configuring the Gripper Arm
Before you use your Gripper Arm Add-on, you should configure it to your Robot. This is done using the app, where you will just be re-naming the Add-on in the app, but also checking that your gripper arm is correctly identified by the Robot.
Step 1.
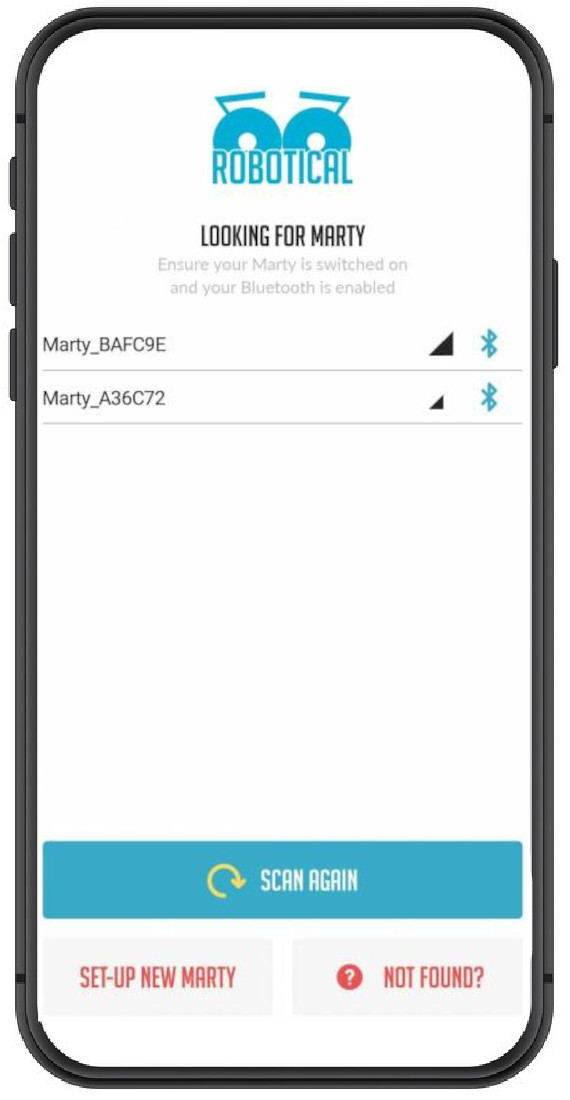
Open the app and connect to your Marty.
Step 2.
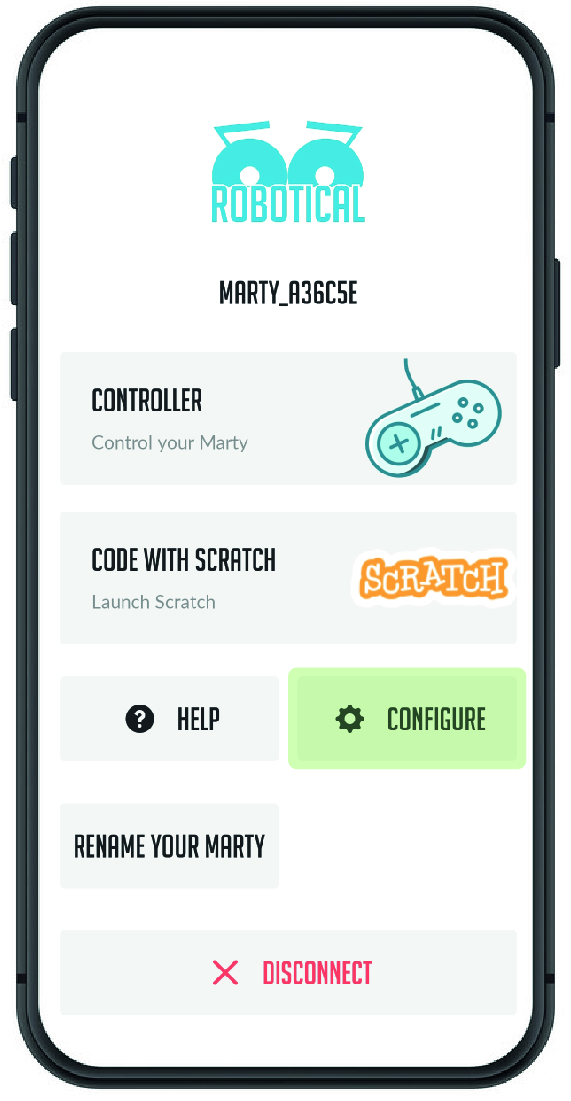
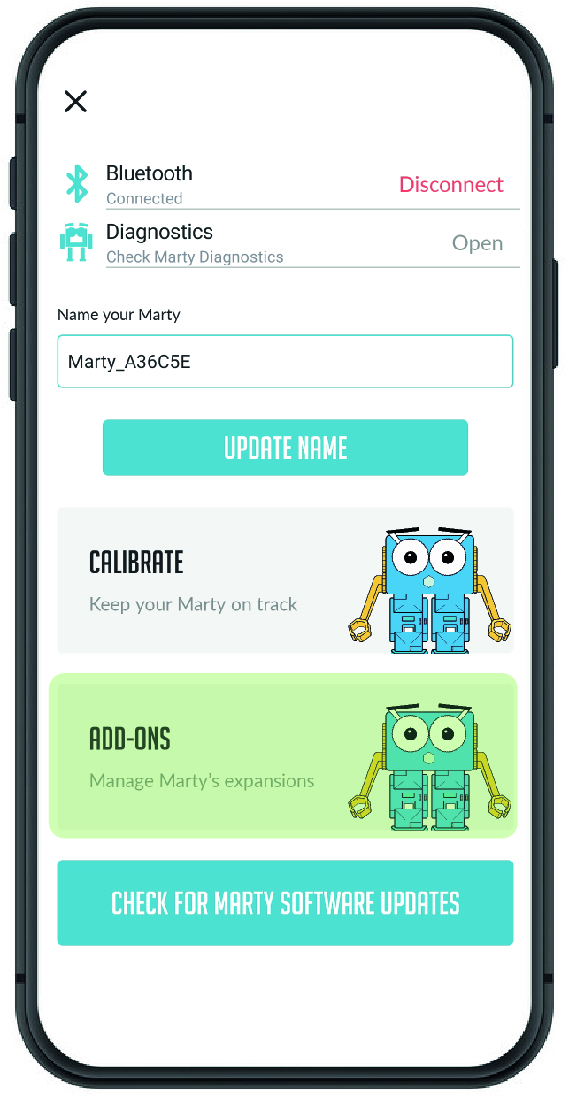
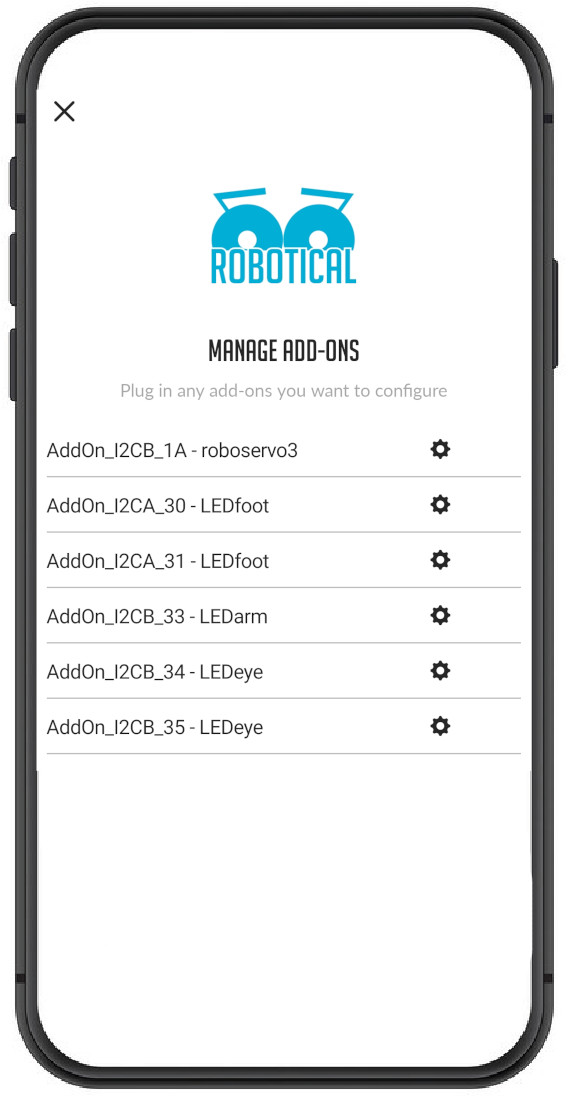
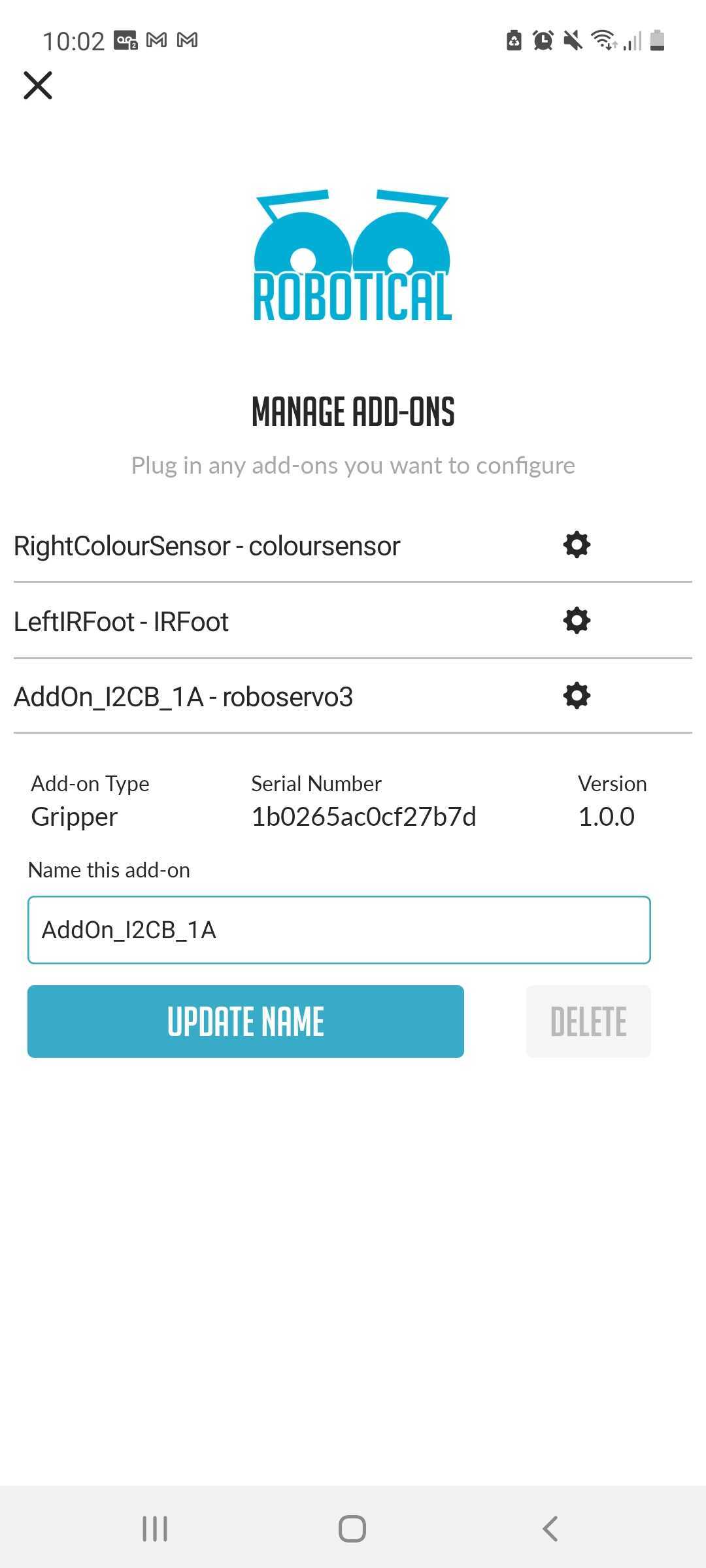
Choose “configure”, then, “Add-ons”. This will bring up the “Add-on Manager” menu, where you can configure your connected and saved add-ons.
Step 3.
Before it is configured, the gripper arm will be named with the suffix “roboservo3”. When an add-on is selected, the Add-on Manager will display the add-on's type, its serial number, and a text box where you can enter a new name for your add-on. Save your changes by pressing 'Update Name'.
Now that your Gripper Arm add-on is named, click into Scratch to start programming with it!
Troubleshooting.
If your Gripper Arm add-on isn't displayed on the Add-on Manager, try the following:
- Restart the Robot and App.
- Check that the Gripper Arm servo is plugged in correctly to the I2C port.
- Try plugging the Gripper Arm servo into a different I2C port.
Using the Gripper Arm in Marty Blocks
The blocks to control the Gripper Arm add-on can be found under the 'Motion' section in Marty Blocks.
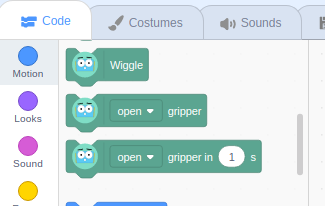
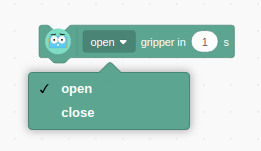
These Marty Blocks allow you to open/close the Gripper.
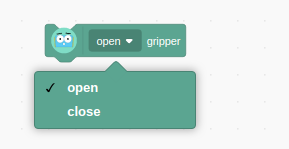
The first block is simple and allows you to set the Gripper to open or closed, using the drop down menu.
The second block also sets the Gripper using the drop down menu; additionally, it takes a second parameter, which tells the robot how many seconds to take to carry out the action.
For example, if you select “open” and enter “5” it will take the robot 5 seconds to open the Gripper.