About Robotical Case Studies Meet the Team Blog Contact Us
Lessons & Resources Marty for Educators Funding & Grants Professional Development Why Teach STEM? Coding Environments
Code Online Download Apple App Download Android App Update your Marty
Get Started Support & FAQs Marty V2 User Guides Marty V1 Resources Request Support
Buy Marty Class Packs Add Ons & Extras Account Shipping, Returns & Cancellations Distributors
Knowledge BaseMarty V2User Guides
Marty User Guides
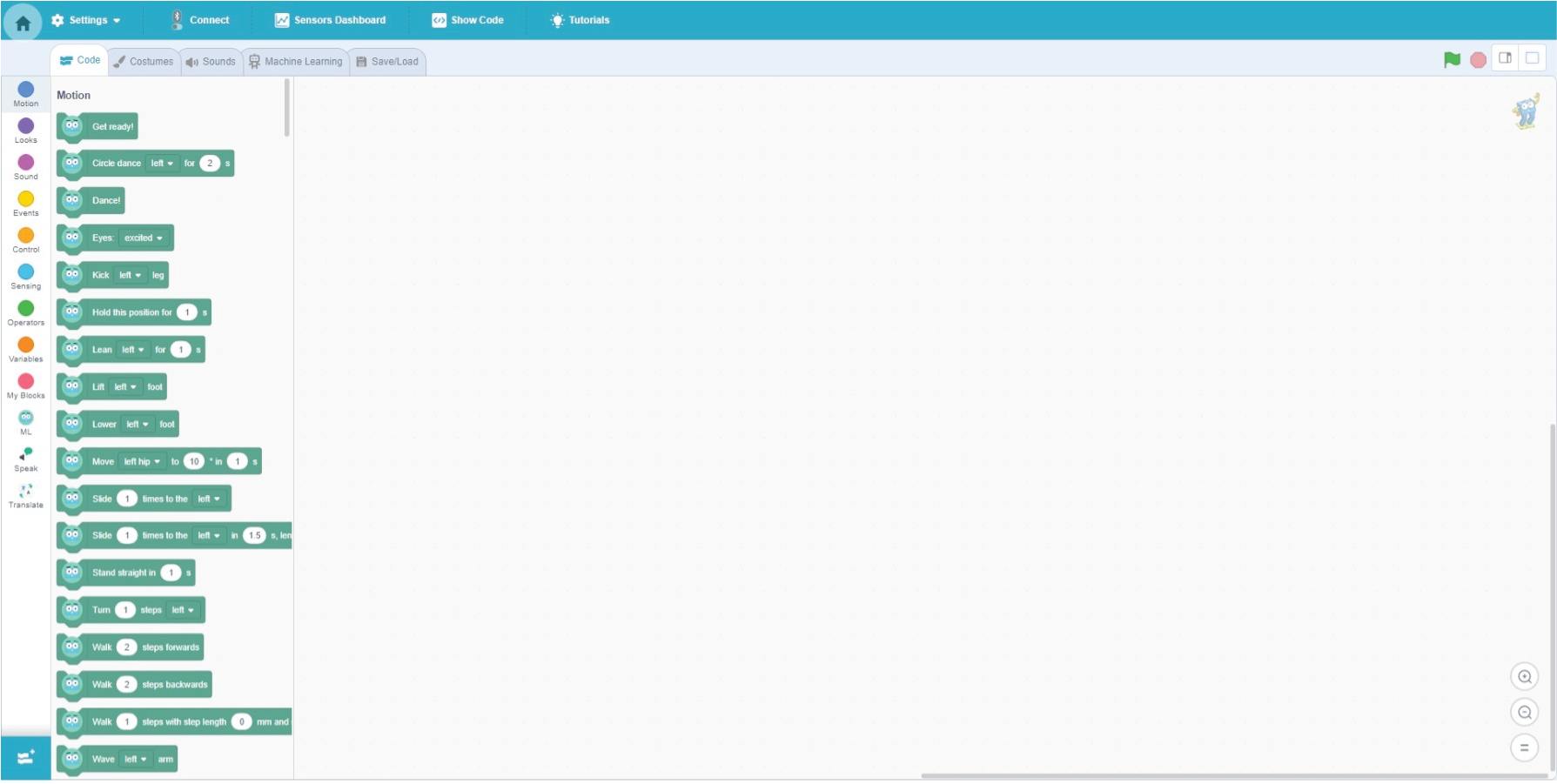
This document shows you how to get startedprogramming your Marty v2 with (based on Scratch 3.0)...
Information This page will get you up and running in whether you are using on a Windows, Mac or Linux...
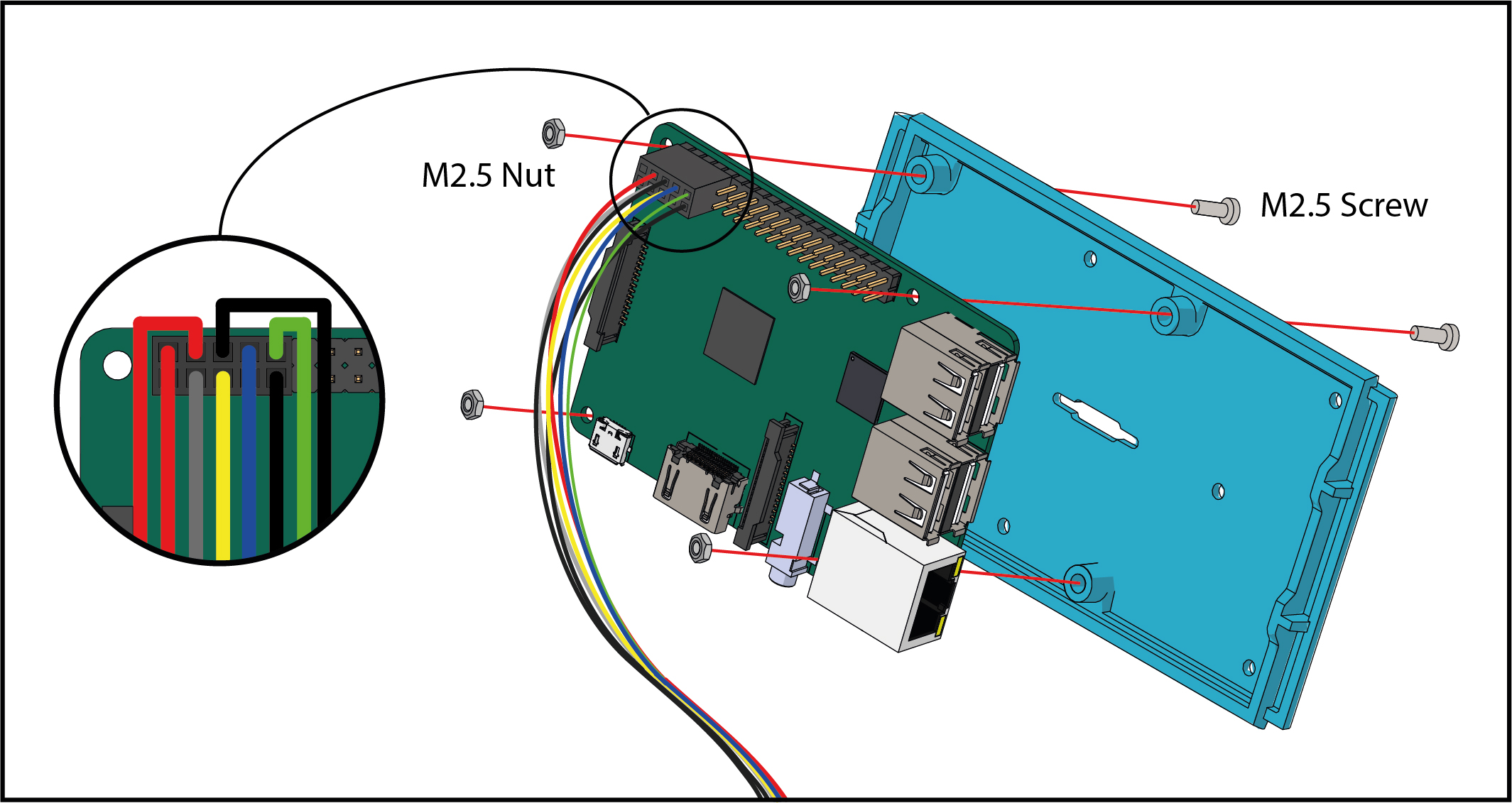
This guide explains how to add a to Marty V2 and get even more out of both. It assumes that you already...
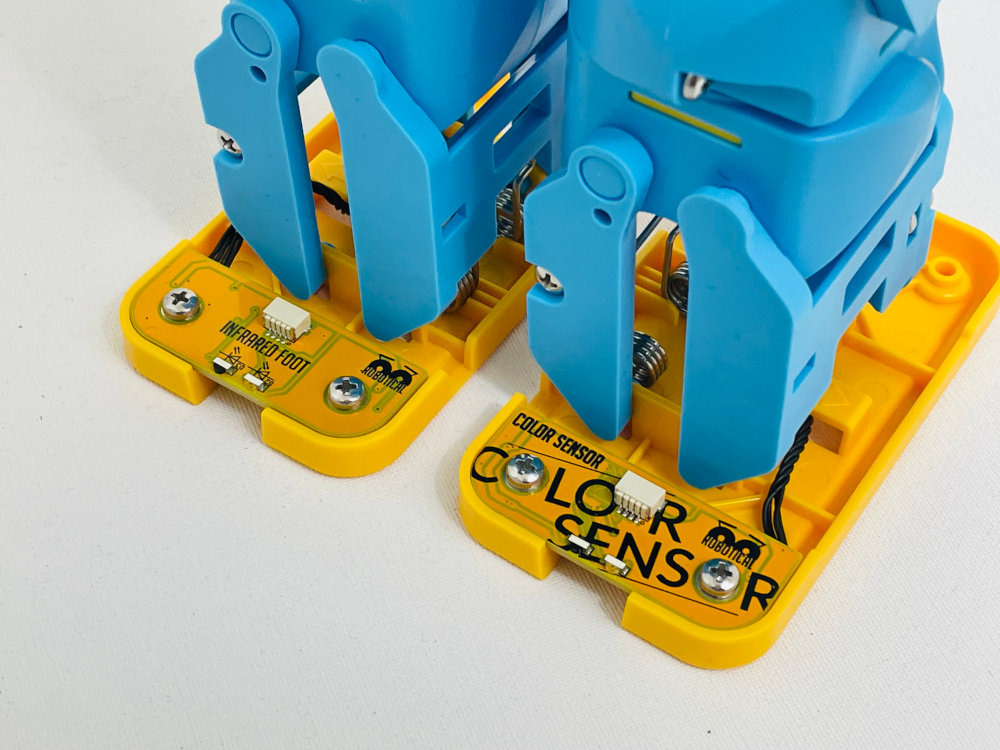
These documents will walk you through how to get started with Marty's inbuilt sensors and addons!
This section introduces users to our 2-year free warranty service. This service is designed to help with...
The Marty app can control, configure and program Marty over a bluetooth connection. It's available for...
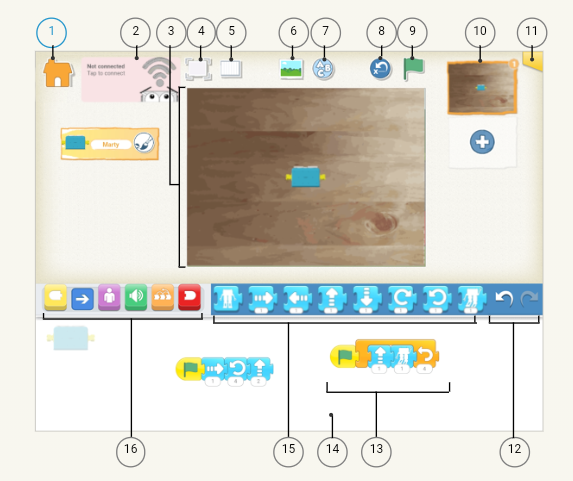
This document shows you how to get started programming your Marty v2 with . (based on Scratch Jr)...
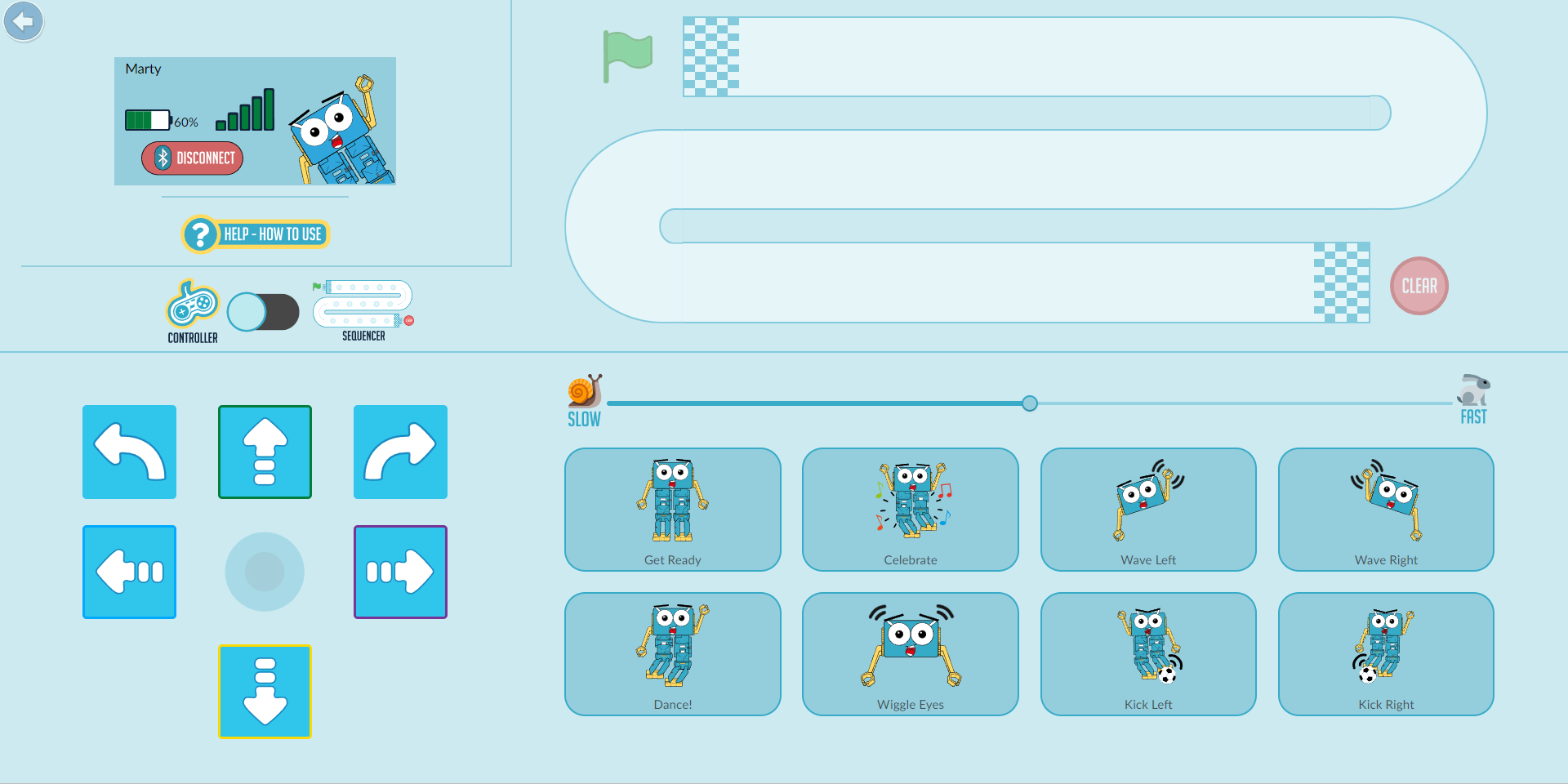
This document shows you how to get started with the on the Marty v2 app. Our Marty controller is...
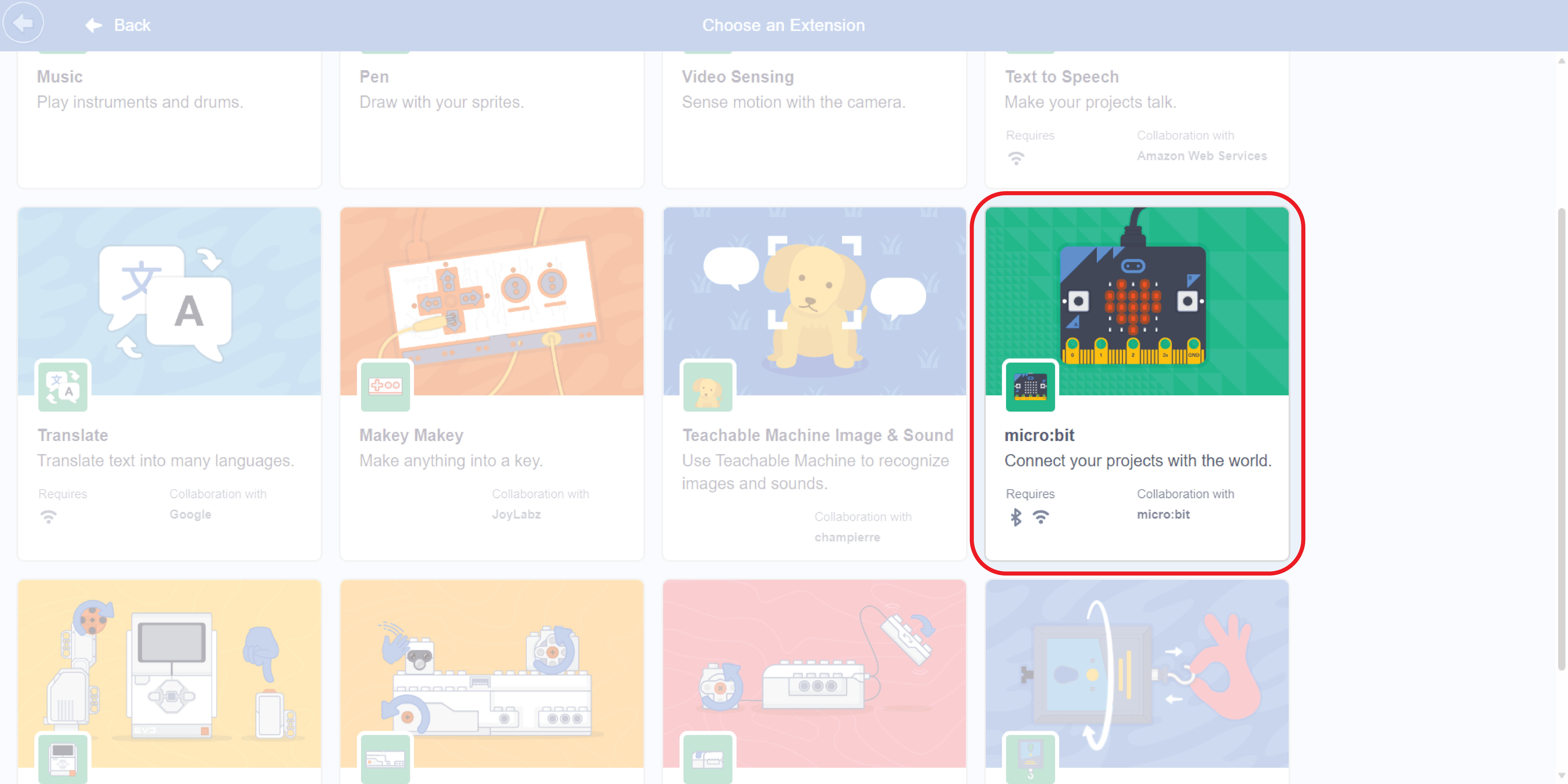
This document shows you how to get startedprogramming your Marty v2 with Marty Blocks and The BBC...
This document shows you how to get started programming your Marty v2 with Unplugged Mode Marty can...