
NOTE - You need firmware v0.0.124 or above for this add-on to function. Please use the app to check for updates available.
To connect your Distance Sensor to your Marty you will need:
- A mounted distance sensor plus cable
- A Marty
Building and Attaching the Distance Sensor Chin Mount
Building and Attaching the Distance Sensor Head Mount
Configuring the Distance Sensor
Before you can use your Distance Sensor you must configure it to your Robot. This is done using the app, you are just naming the Add-on in the app.
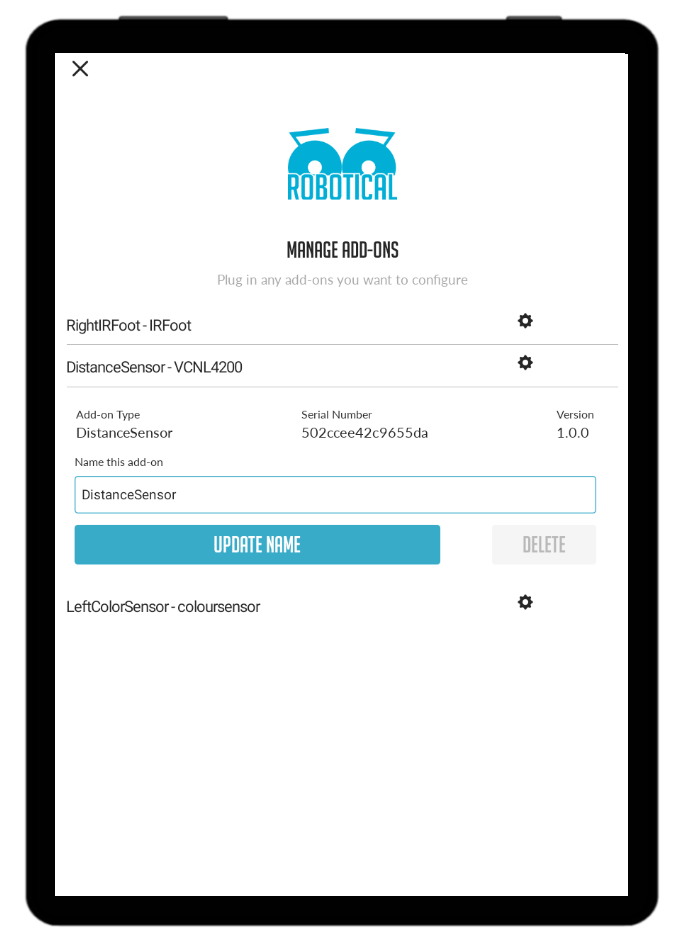
When you are connected to your Marty from the Marty the Robot v2 app, select Configure then Add-ons to get to the Add-on configuration screen.
Name the add-on “DistanceSensor”. Click “Update Name”. NOTE the capital letters on Distance and Sensor and no space between the words; if the Add-on isn't named exactly, then MartyBlocks won't be able to read it.
 Now that your distance sensor is named. Click into MartyBlocks to start programming with it!
Now that your distance sensor is named. Click into MartyBlocks to start programming with it!