Please only do this if you've been asked to do so by Robotical, or if you know what you're doing!
If Marty receives a large knock, it is possible that the servo arm will skip around the servo spline. This will result in Marty not being able to move a joint to the full range of movement
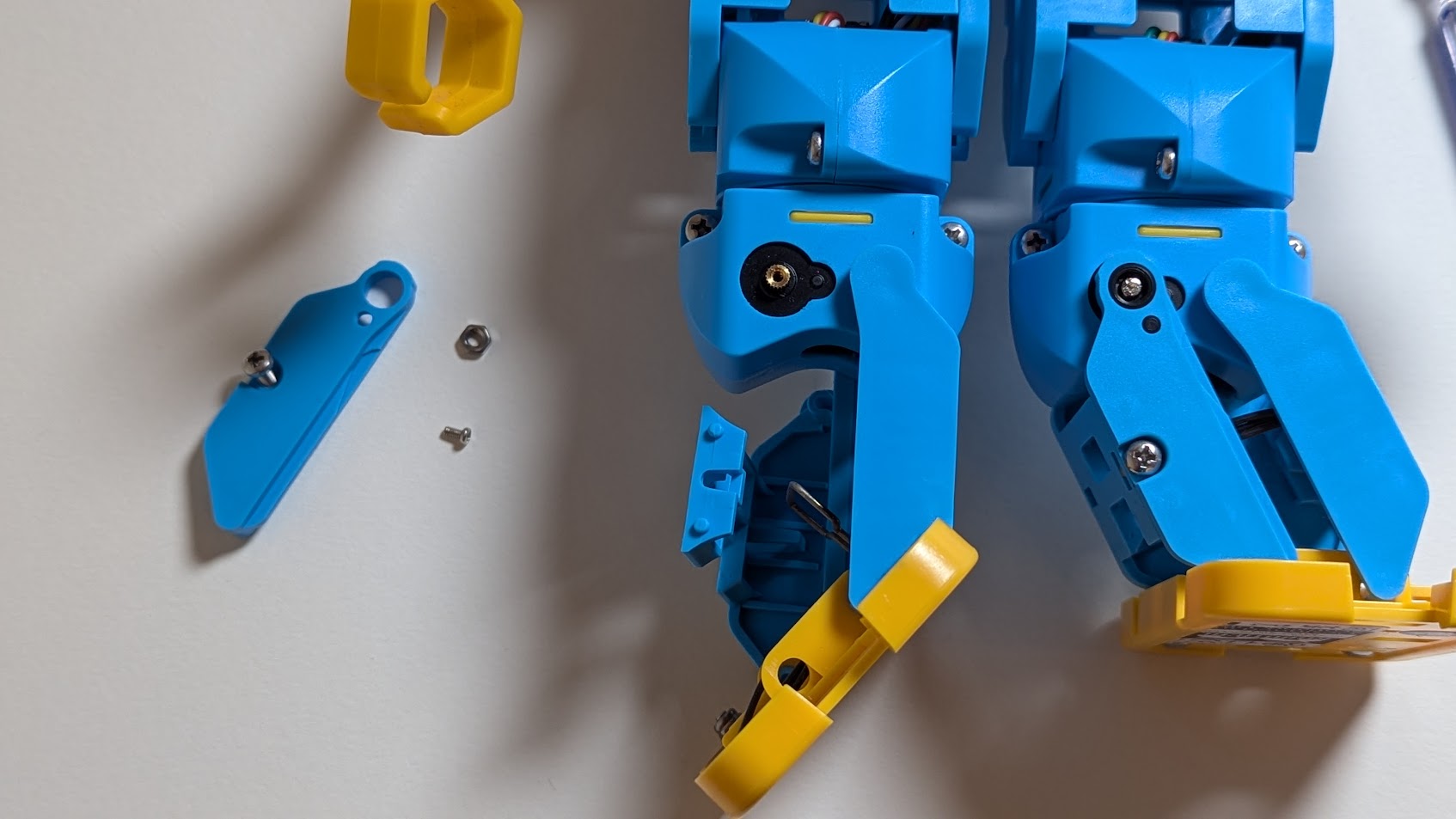
Remove the link from the affected servo
Using a screwdriver, unscrew and remove the blue link. Be careful not to lose the nut!

Remove the Servo Horn
Remove the small screw from the black servo horn as well, and then remove it from the servo. It will be stiff but will pull off - you can lever it with the end of the screwdriver if you need to
Zero the Servo
Go to https://updates.robotical.io/zero-servo/ , connect Marty by USB cable to the computer, and click the “Connect” button. Select the option that appears as “USB Serial”

Once connected, click the button to zero the affected servo.
In the case shown in these photos that is the Left Knee
The servo will rotate to its true zero position. You can then re-assemble the joint
Reassemble the Robot
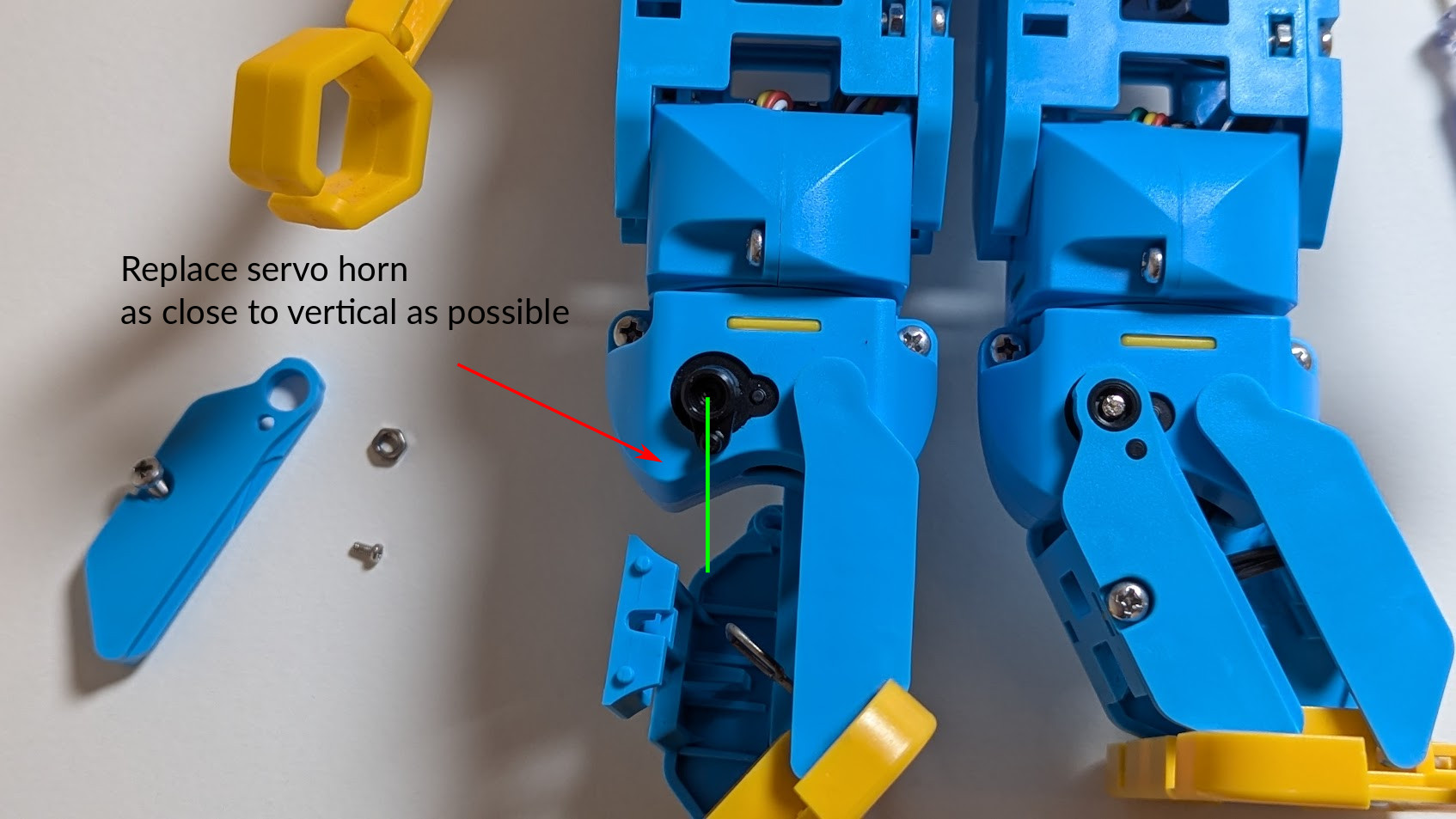
Reinstall the servo horn, being careful to align it with the position it would be in if Marty were standing straight. It will likely have to be a few degrees off to fit on the spline, that's fine and will be taken care of by the calibration step

Reassemble the leg
Calibrate the legs

Calibrate the legs in the app.
Go to https://codemarty.com, connect to your Marty, click “Configure Marty”, then “Calibrate”, then “Leg Calibration”, and follow the onscreen instructions. You will need to manually move Marty into a standing position before saving the calibration and testing the walk
Any issues? Contact Robotical
If you have any issues, or if there is damage to the servo horn and you need a replacement, please contact support@robotical.io and we'll get it sorted asap